

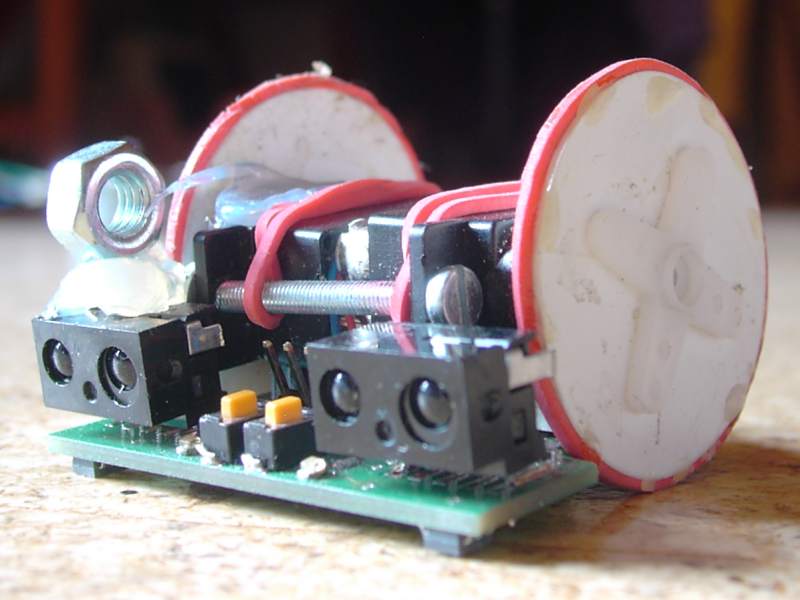
Bussi von Bayern ist ein MikroSumo-Roboter, d.h. er darf maximal 50 × 50 × 50 mm groß sein und maximal 100 g schwer. Aufgrund dieser Vorgaben ist man bei der Auswahl der Motoren und des Antriebs sehr beschränkt. Die Wahl fiel hier auf umgebaute Mikroservos, da diese auch bei anderen MikroSumo-Robotern verwendet werden, sehr günstig sind und trotzdem relativ viel Kraft haben.
Außerdem hat der Roboter vorne rechts und links jeweils einen Abstandssensor (SHARP GP2Y0D340K), damit der Roboter erkennen kann, wo sich sein Gegner vor ihm befindet.
Um diese 2 Dinge wurde der Roboter konstruiert. Die Platine befindet sich als tragendes Element unten. Daran lassen sich die Helligkeitssensoren (OSRAM SFH9202) zum Erkennen des Randes der Wettbewerbsbahn gut in den Ecken anordnen.
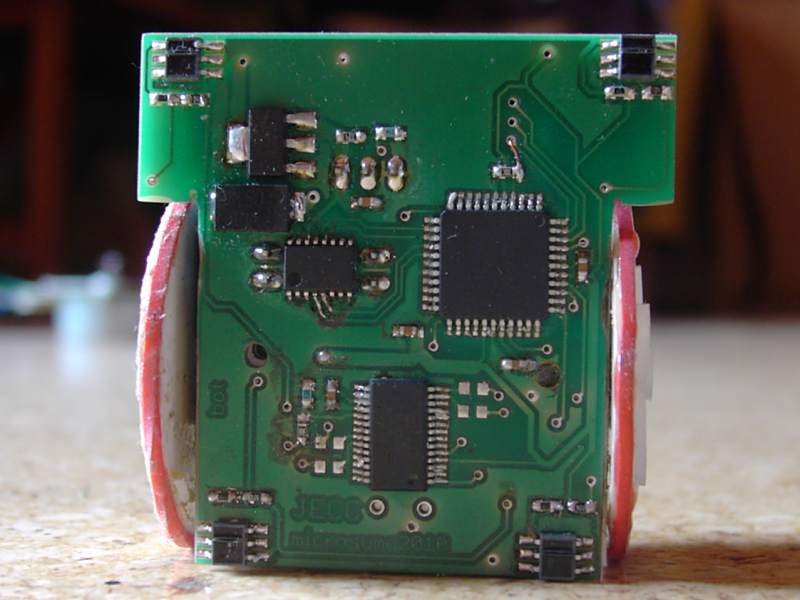
Als Prozessor komm ein ATmega644 zum Einsatz. Die Spannungsversorgung übernehmen 2 LiPo-Zellen. Diese versorgen über einen BA 6845 FS direkt die Motoren. Mit einem LT1117 werden 5 V für den Mikrocontroller und die restliche Elektronik erzeugt. Zusätzlich befindet sich noch ein FT232R USB-Seriell-Konverter auf der Platine, über den der ATmega mittels Bootloader programmiert werden kann.
Die Motoren/Servos sind auf einer PVC-Platte befestigt, die dann mit der Platine verklebt wurde. Die Räder bestehen auch aus PVC mit einer aufgeklebten Lauffläche aus Gummi.
In dieser Form trat der Roboter bei der RobotChallenge 2010 in Wien an. Prinzipiell funktionierte der Roboter recht gut, allerdings kamen auch einige Unzulänglichkeiten ans Licht. So ist er mit etwa 60 g viel zu leicht, weshalb er mit Gewichten eingeschwert wurde. Außerdem fehlt ihm eine Rampe. Und schließlich war der mechanische Aufbau teilweise etwas zu ungenau, so dass z.B. die Helligkeitssensoren nicht einwandfrei funkionierten.

Deshalb wurde er zur RobotChallenge 2011 umgebaut. Alle PVC-Teile flogen raus und stattdessen wurde eine neuer Motorträger aus einem Alublock gefräst, der dann mit der Platine verschraubt wurde. Zusätzlich wurden neue Räder aus Alu gedreht, die eine breitere Lauffläche haben und dementsprechend mehr Grip versprechen. Weiterhin wurde eine Haltefläche für den Akku gefräst, damit dieser immer an seinem Platz bleibt. Zu guter Letzt erhielt er noch eine etwa 3 cm lange Rampe.

Die Wirksamkeit dieser Umbauten kann man auf diesen Videos von der RobotChallenge 2011 sehen.
Der Roboter kam damit in die Finalrunde.